Japanese page is here
Last modified 02/12/2002
Vision Unit
The vision unit for RCX using MITSUBISHI's artificial retina sensor(M64270G)
and Cygnal's 8bit microcontroller(C8051F300).
Hardware
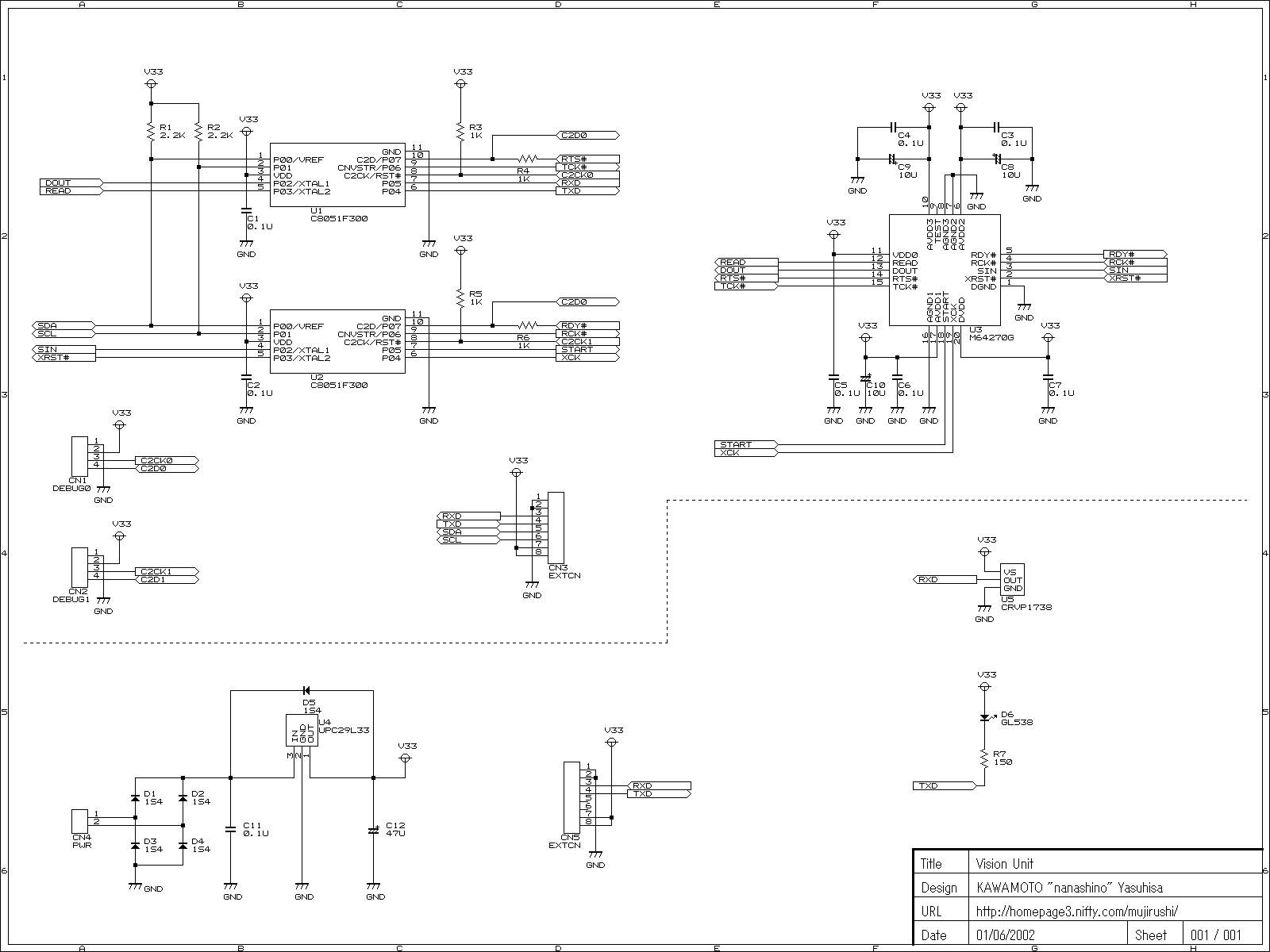
It is a circuit diagram of Vision Unit(version 01/06/2002).
Because the I/O port is not sufficient in one C8051F300, M64270G is controlled by using it two.
(Two C8051F300 is connected by SMBUS.)
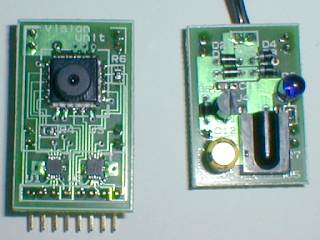
It is composed of two pieces (Camera Board and IR Interface Board).
The Camera Board is composed of M64270G and C8051F300.
The IR Interface Board is composed of Voltage Regulator and IR Remote Control Module.
The parts table of Vision Unit
| Kind |
Name |
Quantity |
Part No. |
Note |
| Camera Board |
|---|
| IC |
C8051F300 |
2 |
U1,U2 |
Cygnal $10.59 |
| M64270G |
1 |
U3 |
- |
| Resistor |
1K |
4 |
R3-R6 |
Satoh Denki 275yen(50 pieces)
2012(2125)
|
| 2.2K |
2 |
R1,R2 |
| Capacitor |
0.1U |
7 |
C1-C7 |
Satoh Denki 160yen(20 pieces)
2012(2125)
|
| 10U |
3 |
C8-C10 |
Satoh Denki 35yen
Tantalum capacitor 10V
A(3216)
|
| Connector |
Pin header |
proper quantity |
CN1-CN3 |
- |
| PCB |
Double side PCB |
1 |
- |
OLIMEX $33.6(8 sets) |
| IR Interface Board |
|---|
| IC |
UPC29L33 |
1 |
U4 |
Wakamatsu Tsusho 70yen |
|
CRVP1738
*1
|
1 |
U5 |
Akizuki Denshi Tsusho 200yen |
| Diode |
1S4 |
5 |
D1-D5 |
Akizuki Denshi Tsusho 250yen(10 pieces) |
| LED |
GL538 |
1 |
D6 |
- |
| Resistor |
150 |
1 |
R7 |
Satoh Denki 275yen(50 pieces)
2012(2125)
|
| Capacitor |
0.1U |
1 |
C11 |
Satoh Denki 160yen(20 pieces)
2012(2125)
|
| 47U |
1 |
C12 |
Sengoku Densyo 200yen(10 pieces) |
| Cable |
9V Connecting Lead |
1/2 |
- |
- |
| PCB |
Double side PCB |
1 |
- |
OLIMEX $33.6(8 sets) |
- *1
-
The operation voltage of this parts is 4.5~5.5V.
However, it is used by 3.3V in this circuit.
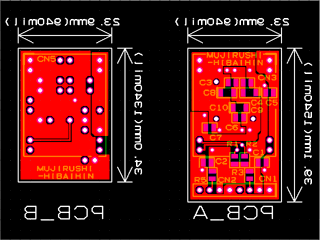
It is a PCB of Vision Unit(version 01/08/2002).
It is Camera Board(PCB_A) and IR Interface Board(PCB_B).
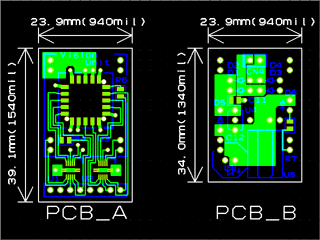
The PCB of eight sets was ordered to OLIMEX.
(Because I had hurried up, EMS was chosen. If AirMail is chosen, shipping fee is $8.)
| Items | Qty | Unit Price | Item Total |
|---|
| DSS(PCB_A x8, PCB_B x8) |
1 |
$26.00 |
$26.00 |
| Exceed 500 drill holes |
1 |
$2.60 |
$2.60 |
| Second silkscreen print |
1 |
$5.00 |
$5.00 |
| EMS shipment |
$30.00 |
| Total |
$63.60 |
It is an assembled PCB.
These two PCB are used for back to back.
When the consumption current had been measured, it was about 35mA.
Firmware
Firmware for C8051F300.
Specification
It communicates with RCX by the IR message.
| Direction of communication |
Command/Response |
Parameter |
IR message |
Note |
| b7 |
b6 |
b5 |
b4 |
b3 |
b2 |
b1 |
b0 |
| RCX -> Vision Unit |
Horizontal Position Request |
- |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
The horizontal position of the object is returned by "Position Response". |
| - |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
| 1 |
0 |
0 |
0 |
0 |
0 |
1 |
- |
|
| 1 |
0 |
0 |
0 |
0 |
1 |
- |
- |
|
| 1 |
0 |
0 |
0 |
1 |
- |
- |
- |
|
| Identification Color Setting |
R select |
1 |
0 |
0 |
1 |
- |
- |
0 |
0 |
Red = 90h(144)
Green = 91h(145)
Blue = 92h(146)
Yellow = 96h(150)
Orange = 9Dh(157)
"Normal Termination Response" is returned at the normal termination.
|
| G select |
1 |
0 |
0 |
1 |
- |
- |
0 |
1 |
|
| B select |
1 |
0 |
0 |
1 |
- |
- |
1 |
0 |
|
| - |
1 |
0 |
0 |
1 |
- |
- |
1 |
1 |
|
| There is not a color coordinates sign reversing. |
1 |
0 |
0 |
1 |
- |
0 |
- |
- |
|
| There is a color coordinates sign reversing. |
1 |
0 |
0 |
1 |
- |
1 |
- |
- |
|
| The color coordinates are not exchanged. |
1 |
0 |
0 |
1 |
0 |
- |
- |
- |
|
| The color coordinates are exchanged. |
1 |
0 |
0 |
1 |
1 |
- |
- |
- |
|
| - |
1 |
0 |
1 |
- |
- |
- |
- |
- |
|
| 1 |
1 |
- |
- |
- |
- |
- |
- |
|
| Vision Unit -> RCX |
- |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
| Normal Termination Response |
- |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
| - |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
- |
|
| Position Response |
none |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
|
| right/lower |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
|
| left/upper |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
|
| center |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
|
| - |
0 |
0 |
0 |
0 |
1 |
- |
- |
- |
|
| 0 |
0 |
0 |
1 |
- |
- |
- |
- |
|
| 0 |
0 |
1 |
- |
- |
- |
- |
- |
|
| 0 |
1 |
- |
- |
- |
- |
- |
- |
|
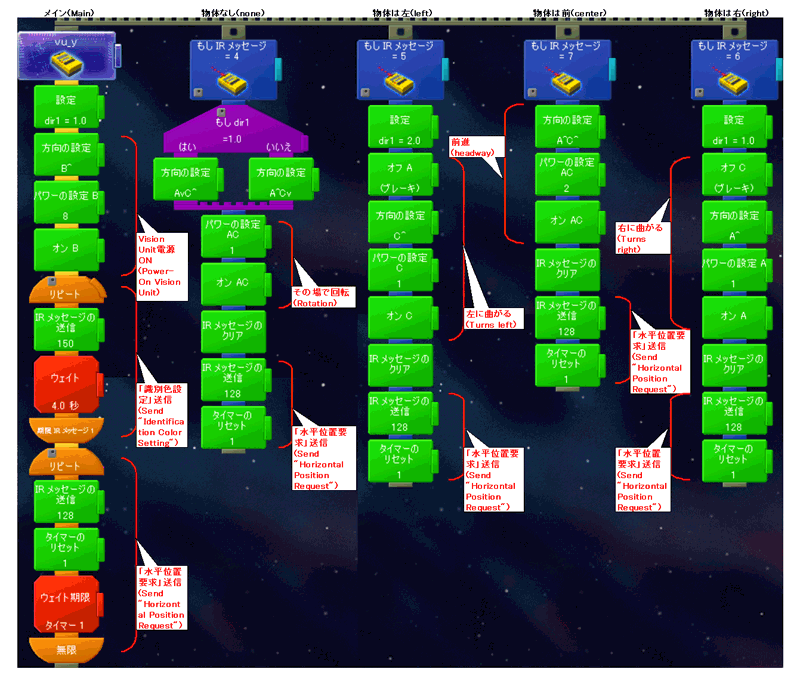
Example
It is an example of using Vision Unit.
A left motor is connected with port A, and a right motor is connected with port C.
The power supply of Vision Unit is taken from port B.
It looks for a yellow object by this RCX code(RIS2.0 which I am using is a Japanese version.)
and it approaches automatically.
(A right and left message has reversed because Vision Unit is installed inverted.)
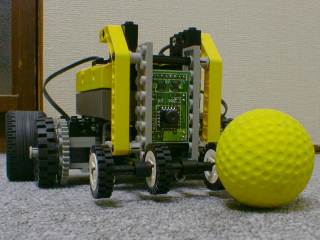
Movie(160x120) : ball.asf(200,922byte)
Return