トレースロボットとは、定められたコースを追跡(トレース)
することを目的としたロボットです。その目的を達成するため、これには少なくとも移動用足回りとコースを読みとるセンサが必要で、センサからの情報に基づ
いてロボットの動きを制御しなければなりません。本実験では、ロボットというほどおおげさなものではないという意味で”トレースカー”と呼ぶことにしまし
たが、制御にはマイクロチップ・テクノロジー社の
PIC16F84Aというワンチップマイコンを使用しました。
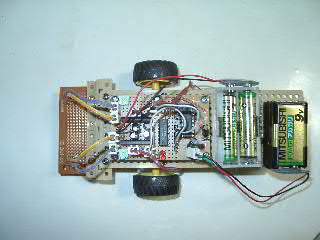
センサーは反射型フォトインタラプタ(写真)がよいだろうとのことで(大阪日本橋の「デジット」 という店の気のいい兄ちゃんの薦め。別の品物の回路図を気前よくコピーしてくれた)、正規の仕様書はありませんでしたが4個手に入れました。これが難物で 2個を壊してしまいましたが、ブレッドボードでテストすること2日、やっと回路図にあるようなつなぎ方で動作確認しました。間違った使い方かも知れません が、長時間にわたってチャンと求める動きを示し燃えたりしなければ問題ないだろうと考えました。 またこの店で手に入れた「PIC16C84テストボード(基板のみ)」にPIC16F84用の部品をのせました。この基盤は空きスペースがユニバーサル基盤となっていますので、ここにモータのコントローラ回路とセンサー回路を作り込むことにしました。半田 付けが下手なのでそうとう苦労しました。やはり、ありあわせのもので物を作るというのはそう簡単ではないことを実感しました。今後はプリント基板への挑戦 が課題だなと思います。
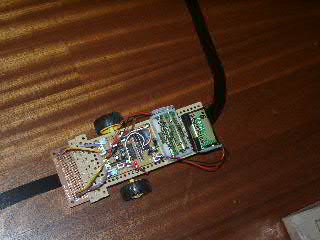
ここで実現したライントレースの原理は、写真右のように床面に描いたライン(黒いテープ)を左右二つのセンサーが読み取り、現在センサーは黒テープ上か 否かを判定し、その結果をマイコンに返します。そして右センサーだけがライン上にあればマイコンからモータ制御IC(TA7291S、東芝)に信号を送って、右の車輪を止め(左車は回転)、左センサーだけがライン上に あれば左の車輪を止める(右車は回転)、また、両センサーともライン上にある場合やない場合は左右車輪とも回転、としたものです。こうすればトレースカー はクロス部分があってもラインを追従して走行します。
あと主な使用材料は田宮模型のツインモーターギヤーボックス(70097 TWIN-MOTOR GEARBOX)やユニバーサルプレートセット(ITEM 70098)、トラックタイヤセット(ITEM 70101)などです。
制御プログラム(C言語 、アセンブラ)は、HI−TECH社のPIC−Lite Cコンパイラとマイク ロチップ・テクノロジー社が統合開発環境MPLABとともに無償で提供しているアセンブラMPASMで作成しました。PIC-Lite Cコンパイラは使 用できるデバイスが、PIC16C84、PIC16F84、PIC16F84Aのみに限定されていますが無償で配布(機能限定版)されています。
(2003年8月27日)
センサーは反射型フォトインタラプタ(写真)がよいだろうとのことで(大阪日本橋の「デジット」 という店の気のいい兄ちゃんの薦め。別の品物の回路図を気前よくコピーしてくれた)、正規の仕様書はありませんでしたが4個手に入れました。これが難物で 2個を壊してしまいましたが、ブレッドボードでテストすること2日、やっと回路図にあるようなつなぎ方で動作確認しました。間違った使い方かも知れません が、長時間にわたってチャンと求める動きを示し燃えたりしなければ問題ないだろうと考えました。 またこの店で手に入れた「PIC16C84テストボード(基板のみ)」にPIC16F84用の部品をのせました。この基盤は空きスペースがユニバーサル基盤となっていますので、ここにモータのコントローラ回路とセンサー回路を作り込むことにしました。半田 付けが下手なのでそうとう苦労しました。やはり、ありあわせのもので物を作るというのはそう簡単ではないことを実感しました。今後はプリント基板への挑戦 が課題だなと思います。
ここで実現したライントレースの原理は、写真右のように床面に描いたライン(黒いテープ)を左右二つのセンサーが読み取り、現在センサーは黒テープ上か 否かを判定し、その結果をマイコンに返します。そして右センサーだけがライン上にあればマイコンからモータ制御IC(TA7291S、東芝)に信号を送って、右の車輪を止め(左車は回転)、左センサーだけがライン上に あれば左の車輪を止める(右車は回転)、また、両センサーともライン上にある場合やない場合は左右車輪とも回転、としたものです。こうすればトレースカー はクロス部分があってもラインを追従して走行します。
あと主な使用材料は田宮模型のツインモーターギヤーボックス(70097 TWIN-MOTOR GEARBOX)やユニバーサルプレートセット(ITEM 70098)、トラックタイヤセット(ITEM 70101)などです。
制御プログラム(C言語 、アセンブラ)は、HI−TECH社のPIC−Lite Cコンパイラとマイク ロチップ・テクノロジー社が統合開発環境MPLABとともに無償で提供しているアセンブラMPASMで作成しました。PIC-Lite Cコンパイラは使 用できるデバイスが、PIC16C84、PIC16F84、PIC16F84Aのみに限定されていますが無償で配布(機能限定版)されています。
(2003年8月27日)