Sazanami Online
僗僥僢僺儞僌儌乕僞偺嬱摦幚尡
Index 偵栠傞
- 僕儍儞僋FDD偐傜傕偓庢偭偨僗僥僢僺儞僌儌乕僞!!
- 崱夞巊梡偟偨偺偼僲乕僩僷僜僐儞梡偺FDD丄TEAC FD-05HG偲CITIZEN V1DB-19A偱偡丅
廐梩尨偱100墌掱搙偱攧偭偰偄傞偐丄柍椏偺僟儞儃乕儖偵擖偭偰偄傞傛偆側偄傢備傞僑儈偱偡丅
僼儘僢僺乕僨傿僗僋偺僿僢僪傪摦偐偡堊偺彫宆儌乕僞乕側偺偱丄帺憱儘儃僢僩偵偡傞傛偆側僷儚乕偼弌傑偣傫丅
彫偝偄偺偑TEAC偵偼偄偭偰偄偨傕偺偱丄戝偒偄偺偑CITIZEN偱偡丅

偄偢傟傕係抂巕偱CITIZEN偺傕偺偼丄5V25兌偲彂偄偰偁傝傑偟偨丅
TEAC傕抂巕娫掞峈偑23乣25兌偩偭偨偺偱摨摍昳偺傛偆偱偡丅
抂巕偼 A1 B1 A2 B2 偺弴偱丄A1-A2,B1-B2娫偵僐僀儖偑偁傞傛偆偱偡丅
僀儞僟僋僞儞僗側偳偼晄柧偱偡丅
- 俀憡僶僀億乕儔
- 婯奿偼晄柧偱偡偑係抂巕偱偡偟俀憡僶僀億乕儔偱偡偹丅
俀憡僶僀億乕儔偼俀偮偺僐僀儖偑偁傝丄偙傟偵棳偡揹棳偺曽岦傪曄偊偰嬌惈傪斀揮偟嬱摦偟傑偡丅
儐僯億乕儔偵斾傋偰峔憿偑僔儞僾儖偱彮側偄揹埑偱僩儖僋傪摼傜傟傑偡偑丄惂屼偑暋嶨偱崅懍夞揮偵岦偐側偄偲偄偭偨摿挜偑偁傝傑偡丅
俀憡僶僀億乕儔嬱摦(俀憡椼帴)偱偼俀偮偺僐僀儖偵埲壓偺庤弴偱揹埑傪妡偗傑偡丅
| 崁 | 僐僀儖A | 僐僀儖B
|
|---|
| 1 | 惓 | 惓
|
|---|
| 2 | 惓 | 媡
|
|---|
| 3 | 媡 | 媡
|
|---|
| 4 | 媡 | 惓
|
|---|
Step.1丂儕儗乕偵傛傞恖椡嬱摦
- 夞楬
- 僕儍儞僋昳偐傜偺傕偓庢傝側偺偱丄傑偢娙扨側夞楬偱夡傟偰偄側偄偐専嵏偑昁梫偱偡丅
庤巒傔偵儕儗乕偵傛傞恖椡嬱摦傪峴偆帠偵偟傑偟偨丅
嬌惈傪斀揮偝偣傞偵偼丄俁愙揰俀夞楬偺儕儗乕傪壓恾偺傛偆偵攝慄偟傑偡丅
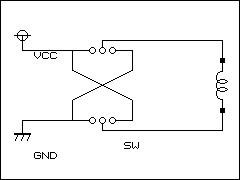
僗僀僢僠傪墴偡偲儕儗乕偑摥偒嬌惈偑斀揮偡傞巇慻傒偱偡丅
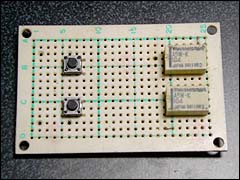
弌棃忋偑偭偨儕儗乕偲僞僋僩俽倂偑俀屄偢偮偺娙扨側帋嶌夞楬丅
- 幚尡奐巒
-
儚儞丒僣乕丄儚儞丒僣乕偲僥儞億椙偔僗僀僢僠傪墴偟偰偼棧偟傑偡(徫)
| 崁 | 僐僀儖A | 僐僀儖B | 僞僋僩俽倂偺忬懺
|
|---|
| 1 | 惓 | 惓 | 塃墴偟
|
|---|
| 2 | 惓 | 媡 | 塃墴偟偨傑傑嵍傕墴偟
|
|---|
| 3 | 媡 | 媡 | 嵍墴偟偨傑傑塃傪棧偡
|
|---|
| 4 | 媡 | 惓 | 嵍傪棧偡
|
|---|
俽倂傪墴偡搙偵僠僉僢偲儕儗乕偺摦嶌壒偲僐僢偲僗僥僢僺儞僌儌乕僞偺摦偔壒偑偟傑偡丅
媡偺庤弴偱俽倂傪憖嶌偡傞偲斀懳曽岦偵儌乕僞乕偑夞揮偟傑偟偨丅
俆夞(俀侽僗僥僢僾)偱侾夞揮側偺偱侾僗僥僢僾侾俉搙偱偡偹丅乮屻弎偺侾亅俀憡椼帴摦嶌偱俋搙偵側傝傑偡)
俁偮偺儌乕僞乕偼偡傋偰摦嶌偟傑偟偨侓
- 栤戣敪惗
- 偑丄偟偐偟乧丂偟偽傜偔
梀傫偱幚尡偟偰偄傞偲丄儌乕僞乕偑摦偐側偔側傝傑偟偨丄幉偵儂僐儕偱傕晅偄偨偺偐偲怗傟偰尒傞偲堎忢偵擬偔側偭偰偄傑偡丅懱姶偱俇侽亷偼墇偊偰偄偦偆偱偡丅
僐僀儖傊偺媼揹慜偵俀俀兌偺掞峈傪晅偗傞偲敪擬偼帯傑傝傑偟偨丅庤帩偪偺掞峈偺拞偐傜僊儕僊儕摦嶌偡傞掞峈抣傪慖傃傑偟偨丅柧傜偐偵僩儖僋偑掅壓偟偨姶偑偁傝傑偡丅
俁屄偺儌乕僞乕偺偆偪侾屄偑偙偙偱夡傟偰偟傑偄傑偟偨丅摫捠偼桳傞偺偵摦嶌偟傑偣傫丅幉偼庤偱夢偣傞偺偱幉偢傟傗從偒晅偒偱傕側偝偦偆偱偡丅
偙偺夞楬偱偼忢偵壛揹忬懺偵偁傞偺偱僆乕僶乕儘乕僪偵側偭偰偟傑偆偺偐傕抦傟傑偣傫丅
幚尡拞偼儌乕僞乕偺敪擬偵拲堄偡傞帠両両
嫵孭偵側傝傑偟偨丅
仾PageTop
Step.2丂僷僜僐儞偱惂屼
- 夞楬
- 偝偰丄偄傛偄傛僷僜僐儞偐傜偺惂屼偱偡丅
儕儗乕偼崅懍摦嶌偵岦偄偰偄側偄偟丄晹昳偺楎壔偺怱攝傕偁傞偺偱丄揹巕惂屼偵抲偒姺偊傑偡丅
僩儔儞僕僗僞傗FET傪巊偭偨H僽儕僢僕夞楬偱峔惉偡傞昁梫偑偁傞偺偱偡偑丄偦傟偑IC偵側偭偨暔偑偁傞偺偱偦傟傪巊梡偟傑偡丅崱夞偼DC儌乕僞惂屼梡偺TA7291S(愮愇揹巕偱1屄100墌)傪2屄巊梡偟傑偟偨丅
僷僜僐儞偺僷儔儗儖億乕僩偵TA7291S偺惂屼擖椡傪愙懕偡傞偩偗側偺偱夞楬偼妱垽偟傑偡丅
- 彮偟暋嶨側摦嶌
- 僷僜僐儞偐傜偺捈愙惂屼偱偡偑丄TA7291S偼丄惓揮丒媡揮丒奐曻丒掆巭偺係儌乕僪傪俀價僢僩偱巜掕偱偒傞偺偱丄摦嶌姰椆屻偵昁偢掆巭傪峴偆傛偆偵偟傑偟偨丅敪擬偼偁傝傑偣傫侓
峏偵侾亅俀憡椼帴偱側傔傜偐側夞揮傪峴偭偰傒傑偟偨丅偙傟偩偲侾夞揮偑係侽僗僥僢僾偲側傝丄侾僗僥僢僾偁偨傝俋搙夞揮偟傑偡丅
崱偺偲偙傠僩儖僋傪寁傞偡傋偑柍偄偺偱偳偪傜偑椙偄偲偼敾抐偱偒傑偣傫偑丄楢懕夞揮帪偺怳摦偑偐側傝彮側偔側傝傑偟偨丅
侾亅俀憡椼帴偼埲壓偺庤弴偱揹埑傪妡偗傑偡丅
| 崁 | 僐僀儖A | 僐僀儖B
|
|---|
| 1 | 惓 | 惓
|
|---|
| 2 | 惓 | 亅
|
|---|
| 3 | 惓 | 媡
|
|---|
| 4 | 亅 | 媡
|
|---|
| 5 | 媡 | 媡
|
|---|
| 6 | 媡 | 亅
|
|---|
| 7 | 媡 | 惓
|
|---|
| 8 | 亅 | 惓
|
|---|
仾PageTop
Step.3丂PIC儅僀僐儞偱惂屼
- 夞楬
- 僷僜僐儞偐傜偺惂屼偱偼丄侾僗僥僢僾mS埲壓偺崅懍摦嶌偺幚尡偑崲擄側偺偱丄PIC儅僀僐儞偵傛傞惂屼傪峴偄傑偟偨丅
PIC偼掕斣偺PIC16F84A傪20MHz偱巊梡偟傑偡丅
PIC偲儗僝僱乕僞偲摦嶌妋擣梡偺LED偩偗偺僔儞僾儖側傕偺側偺偱夞楬恾偼妱垽偟傑偡(娋)丅
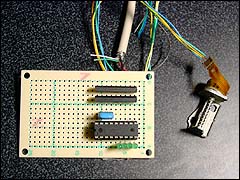
姰惉偟偨儅僀僐儞幃惂屼儃乕僪丅
- 摦嶌
- PIC儅僀僐儞偼僷僜僐儞偺僷儔儗儖億乕僩偐傜惂屼僐儅儞僪傪庴偗儌乕僞傪僐儞僩儘乕儖偟傑偡丅
婯掕偟偨僐儅儞僪偼埲壓偺捠傝偱偡丅
| 僐儅儞僪僐乕僪 | 僷儔儊乕僞 | 摦嶌
|
|---|
| 00 | 亅 | NOP (僥僗僩梡)
|
|---|
| 01 | nn | 塃夞揮 n 僗僥僢僾摦嶌
|
|---|
| 02 | nn | 嵍夞揮 n 僗僥僢僾摦嶌
|
|---|
| 03 | nn | 僗僥僢僾摦嶌Wait傪100uS扨埵偱巜掕
|
|---|
| 04 | 亅 | test LED(RB4)傪ON偡傞
|
|---|
| 05 | 亅 | test LED(RB4)傪OFF偡傞
|
|---|
| 06 | 亅 | 儌乕僞嫮惂掆巭
|
|---|
- 幚尡寢壥
- Step.2偺僷僜僐儞偐傜捈愙惂屼偵斾傋偰偐側傝偺崅懍摦嶌偑妋擣偱偒傑偟偨丅Step.2偱偼侾夞揮偡傞偺偵嵟懍偱傕侾昩嬤偔偐偐偭偰偄偨偲巚偄傑偡丅8.3ms偱侾昩娫偵俁夞揮偺寁嶼偱偡丅
尰嵼偺強丄摦嶌Wait偼惂屼偺僆乕僶乕僿僢僪傪娷傑側偄扨弮側憓擖Wait側偺偱偡偑丄侾僗僥僢僾6ms埲壓偵側傞偲扙挷偟偼偠傔傞傛偆偱偡丅
摦嶌Wait傪彊乆偵尭傜偟偰夞揮傪埨掕偝偣傞壛懍曽幃傗丄
掅懍帪偵偼侾亅俀憡椼帴丄崅懍帪偵俀憡椼帴傪愗傝懼偊傞曄懍曽幃傪峴偊偽丄傕偭偲埨掕偟偨崅懍偑摼傜傟偦偆側偺偱怓乆偲幚尡偟偨偄偲巚偄傑偡偑丄愭偵僩儖僋應掕偲扙挷娔帇傪峴傢側偄偲乧
偮偯偔丅(偺偐丠)
仾PageTop
E-mail : saza00@mail.goo.ne.jp
Index 偵栠傞

