Pinguino
Pinguinoについて
スクリーンショット
- Pinguinoは、Arduinoに良く似た、無料の、お手軽プロトタイピング開発ツールです。
- 対応するマイコンは、MicroChip社の8bit MCU(PIC18F2550など)と32bit MCU(PIC32MX)の2種類です。
- いずれもUSB機能をチップに内蔵していて、非常に廉価です。*1
- また、DIPパッケージ*2なのでブレッドボードで試したり、試作がやりやすいというメリットがあります。
このHPでは、32bit版(PIC32MX)のほうを扱います。
Pinguinoを始めよう。
まずは、マイコンの入手からです。
Pinguino用の基板はOLIMEXが各種発売しています。
チップ単体は秋月などで扱ってます。
- USB内蔵品種を選びますが、Flash容量16kBは少なすぎてちょっと無理なので、今のところはMX220F032Bという品種一択になります。今後は大容量品やDIP以外を扱ってくれることを期待しましょう。
マイコンにファームウェア(ブートローダー)を書き込むライターを入手します。
- MicroChip純正のPicKit3かPicKit2をお勧めします。
- もし、すでにPIC18F2550をお持ちであれば、PicKit2の互換機が簡単に作れます。
- 秋月で110円で売っている別のマイコン(LPC1114FN28)をライターにすることも可能です。
- read more : PIC32MX
自作PIC32MX基板を配線する。
■ 配線 PIC32MX220F032B
3.3V
|
*------10Ω--------------+
10k |
| ___ ___ | 0.1u
ラ --> ----*-MCLR [1 |__| 28] AVDD-*-||---GND
イ --> --PGD3/RA0 [2 27] AVSS--------GND LED
ター --> --PGC3/RA1 [3 26] RB15--1kΩ-------|>|--GND
RB0 [4 25] RB14
RB1 [5 24] RB13
SDA2/RB2 [6 23] Vusb3v3--------3.3V
SCL2/RB3 [7 22] usb D-
Xtal GND----Vss [8 21] usb D+ +10uF
+-----------------OSC1 [9 20] Vcap------||---GND
*--|□|--*--------OSC2 [10 19] Vss------------GND
| 8MHz | U1TX/RB4 [11 18] RB9 *--10k-----3.3V
22pF 22pF U1RX/RA4 [12 17] RB8 |
| | 3.3V--Vdd [13 16] RB7 -----------------------*--BOOT_SW--GND
| | RB5 [14 15] Vbus-----------USB Vbus(5V)
GND GND ~~~~~~~~~~
(準備中)
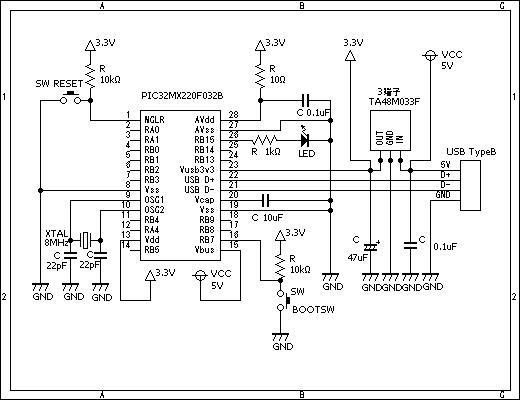
- BOOT_SWはRB7入力のテストとしても使用できます
- 使い勝手を考えると、UBW互換と逆の論理にしたほうが便利です。(ONでスケッチ実行、OFFでBOOTLOADER)
- そうすると、再度スケッチを書き込むときはRESETを押すだけで済みます。
- そのままプロトタイピング完成品として使用する場合は、BOOT_SWを押しボタンではなく、スライドSWか、基板ジャンパーにして、ショートポジションにしましょう。
- 最新のHIDBoot_Mips32gcc.X.zipでは、そのように論理変更しました。
開発環境を入手しよう。
- http://wiki.pinguino.cc/index.php/Main_Page/ja
- 安定版はPinguino3.Xです。
- 開発版はPinguino4.Xです。
- Pinguino4.Xは ここ( http://code.google.com/p/pinguino32/downloads/list )にある
- これ( Pinguino-X4-EasyPack-Win32-Rev903-v01-2013-10.7z )もしくはこれより新しいものを入手して 7zファイルを展開します。
- 展開したディレクトリ名は分かりにくいので、
- すこし分かりやすいように C:\Pinguino4.X\とか D:\Pinguino4.X\のようなディレクトリ名にリネームしておきます。
ブートローダーを書き込む。
- PicKit3,PicKit2、あるいはPicKit2互換機を使ってPIC32MX220にブートローダーを書き込みます。
- ダウンロード:HIDBoot_Mips32gcc.X.zip
- USBに繋ぐとPB15に繋がれたLEDが高速で点滅を始めます。
- LEDが点滅しないときはBOOT_SW OPEN(RB7=High)を確認して、再度RESETを行います。
- USB HIDデバイスなので、Windows(XP|7|8)側はUSBドライバーの導入は不要です。
Lチカ(LED点滅)をやってみる。
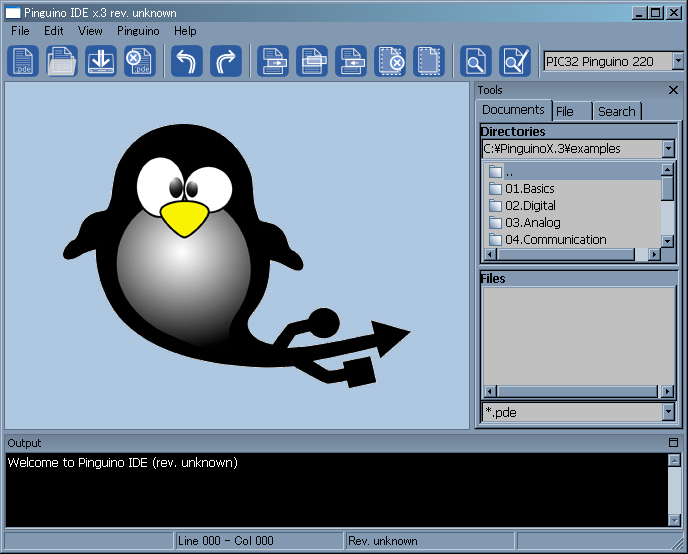
Pinguino IDEを起動します。
- まず、Pinguinoボードの種類を「PIC32 Pinguino 220」に切り替えます。
- 右のToolsの中から、Directories>Examples->01.Basic->Blinkを選びます。
- 下のFiles>メニューにあるBlink.pdeをダブルクリックします。
- ボードの種類選択の右にある「Compile」ボタンを押します。
- エラーがなければその右の「Upload」ボタンを押します。
- Lチカが始まれば成功です。
- 始まらないときは、RESETボタンを押してみてください。
print文でprintしてみる。(USB経由)
同様に、
- まず、Pinguinoボードの種類を「PIC32 Pinguino 220」に切り替えます。
- 右のToolsの中から、Directories>Examples->04.Communications->CDCを選びます。
- 下のFiles>メニューにあるPrintf.pdeをダブルクリックします。
- ボードの種類選択の右にある「Compile」ボタンを押します。
- エラーがなければその右の「Upload」ボタンを押します。
- アップロードが終わるとUSB-CDCデバイスとして新たなデバイスをWindowsが認識します。
- ドライバーinfはPinguinoには含まれていませんので、MicroChipのUSBフレームワークのUSB-CDCのものを使用します。
- teraterm等で、USB-CDCデバイス(Windowsからはシリアルポート COMxx: (xxは数字) として出現)に接続します。
- USB-CDCの場合はボーレートはどれでも関係なく通信できます。
- これ以外のスケッチでCDC.printfを使用している場合にスケッチをコンパイルしたサイズが16kBを超えたら実行できませんので、適宜print文を削ってサイズを減らしてから実行してみます。
- (8kBバージョンのブートローダーを使用する場合は、スケッチサイズを20kBまで拡大できますが(割り込みベクターが4kB消費)そのためにはリンカースクリプトの変更が必要です。)
シリアルポートを使ってみる。
同様に、
- Directories>Examples->04.Communications->Serialを選びます。
- 下のFiles>メニューにあるserialprintf.pdeをダブルクリックします。
- ボードの種類選択の右にある「Compile」ボタンを押します。
- エラーがなければその右の「Upload」ボタンを押します。
配線
- TxDはRB4(出力)、RxDはRA4(入力)です。
- シリアルのボーレートはスケッチ内で定義されています(9600)
Pinguino UART1の RxD/TxDの割り当てソースはどこなのか?
- C:/PinguinoX.4/p32/include/pinguino/core/io.c
// PIC32 Peripheral Remappage void IOsetRemap() { #if defined(PIC32_PINGUINO_220) SystemUnlock(); CFGCONbits.IOLOCK=0; // unlock configuration CFGCONbits.PMDLOCK=0; #ifdef __SERIAL__ U2RXRbits.U2RXR=6; // Define U2RX as RC8 ( D0 ) RPC9Rbits.RPC9R=2; // Define U2TX as RC9 ( D1 ) U1RXRbits.U1RXR=2; // Define U1RX as RA4 ( UEXT SERIAL ) RPB4Rbits.RPB4R=1; // Define U1TX as RB4 ( UEXT SERIAL ) #endif ・・・ - ちなみにUART2のほうはRC8/RC9に割り当てられるっぽいけれど、これは44PINのChipでないと出てこない。
- なので、UART2をRC8/RC9以外にしたい場合は、システム側のIOsetRemap()を書き直すか、これを呼ばずに、コピペして作ったOwnCodeを代わりに呼ぶしかなさそうだ。
- UART以外のI/O Remapに関しても、このio.cを読めばどうなっているか判ると思う。
PinguinoX.4 のスケッチを元に、コマンドライン開発環境を整える方法。
- スケッチは確かにお手軽で良いのですが、普通に秀丸+DOS窓でmakeしたい人。
- スケッチの記述よりもはるかにディープなコードを書きたいけれど、1から始めるのは嫌な人(お手軽フレームワークをそのまま使いたい人。)
向けの環境整備指南です。
これは意外と簡単です。
D:\PinguinoX.4\ ディレクトリにインストールされていると仮定して説明します。
- 1)PinguinoX.4を立ち上げ、デバイス=PINGUINO MX220を選択して、好きなスケッチを読み込む。
- 2)ビルドボタンを押す。
- 3)D:\PinguinoX.4\source\ ディレクトリに必要なファイルが全部用意されますので、これを D:\PinguinoX.4\src\ のようなディレクトリを作って丸コピーします。
- 4)Makefileを書き換えます。
D:\PinguinoX.4\src\> copy Makefile32.win32 Makefile D:\PinguinoX.4\src\> notepad Makefile
notepadでなくて秀丸とかでOKです。
- D:\PinguinoX.4\src\Makefile
------ SHELL = cmd.exe #この後ろに、HOME,BOARD,PROC(essor) の環境変数を付け足します。 HOME = D:\PinguinoX.4 BOARD = PIC32_PINGUINO_220 PROC = 32MX220F032D #SRCDIR = $(HOME)\source SRCDIR = $(HOME)\src #SRCDIR を変えます。
- 出来たら、次は、
- D:\PinguinoX.4\src\setenv.bat
PATH D:\PinguinoX.4\win32\p32\bin;%PATH%
- のような1行バッチを書いてこれを実行し、実行PATHを設定します。
- 面倒なら、あらかじめパスの通っているディレクトリに置いて実行しても良いです。
- あとは Makeするだけです。
追記
clean: if exist $(SRCDIR)\main32.o $(RM) $(SRCDIR)\main32.o if exist $(SRCDIR)\main32.elf $(RM) $(SRCDIR)\main32.elf if exist $(SRCDIR)\main32.hex $(RM) $(SRCDIR)\main32.hex # if exist $(OBJDIR)\processor.o $(RM) $(OBJDIR)\processor.o
- processor.oは、GUIによってデバイスごとにコピーされるので、いったん消してしまうと復活が面倒です。
- (具体的にはOBJDIRの32MX220F032B.o をコピーするだけですが)
- なので、消さないようにコメントアウトします。
PinguinoX.4(rev903)用のスケッチエリア拡大方法
- 以下のアーカイブを適用することによって、スケッチエリアを9kBほど拡大することが出来ます。
- スケッチエリアが足らなくて困る場合は、ぜひ、お試しください。
- ダウンロード:PinguinoX4patch.zip
- 上記パッチには、スケッチエリア拡大のほかに、PWM (または Sound) の不具合修正も含んでいます。
- 音抜け問題と、noTone()やTone(pin,0,duration) でのゼロ割問題を対処。
- PIC32MX220では、PWM出力用のPINに8番は使用できません。12番などをお使いください。(see playMusic.pde)
- OnTimer1〜5を実装してあります。
- TMR2はmillisモジュールと競合しますので、排他的に使ってください。
- TMR3はPWMでも使っていますので、排他的に使ってください。
- 全タイマーは16bitモードで使用します。プリスケーラーは1/256まで、かつTIMER16bitなので、最大インターバルは0.41秒程度までです。(ソフトウェアによる間引きcallback呼び出しは未実装)
- 以下のようなスケッチで実行します。
#define TMR1INT #define TMR3INT #define TMR4INT #define TMR5INT #include <interrupt.c> void myBlink() { static int c=0; c++; if(c>=(100)) { c=0; toggle(USERLED); } } void setup() { IntConfigureSystem(INT_SYSTEM_CONFIG_MULT_VECTOR); IntEnableInterrupts(); pinMode(USERLED, OUTPUT); OnTimer4(myBlink, INT_MILLISEC, 100); // Use Timer0 to toggle pin 0 every 100 ms } void loop() {}
ブートローダーの更新が必要です。HIDBootXのページにある最新版(HIDBoot_Mips32gcc.X.zip)を入手して更新してください。
■ メモリーマップ
- オリジナル版Pinguino
9D00_0000 +---------------+ | HIDBoot.X | | | | UBW32用の | | ブートローダー| | をそのまま使用| | | 9D00_3000 +---------------+ | スケッチ用の | | 例外ベクター | 9D00_4000 +---------------+ | | | | | | | | |スケッチエリア | | (16kB) | | | | | | | 9D00_8000 +---------------+
- パッチ適用後のPinguino
9D00_0000 +---------------+ | HIDBoot.X | | 改良版 | | ブートローダー| 9D00_1000 +---------------+ | スケッチ用の | | 例外ベクター | 9D00_1A90 +---------------+ | | | | | | | | | | | | |スケッチエリア | | (25kB) | | | | | | | | | | | 9D00_8000 +---------------+
蛇足:
- 尚、水晶の代わりに内蔵RC発振を使用するファーム(HIDBoot.X.zip) をご使用の場合は、どうしてもファームサイズが8kBになりますので、パッチのzipファイルに含まれるprocdefs2000.ld のほうをprocdefs.ldと差し替えて使ってみてください。
INDEX:
参考リンク
本家Wiki(日本語ページ)
マイコン風雲録 Pinguino X4 IDE 簡単インストール
*1 秋月などで1個220円程度で買えます。
*2 DIP以外のパッケージも存在します


